高能全息透射成像系统
型 号:nanoVoxel4000
原产地:国产
用 途:


高能全息透射成像系统
型 号:nanoVoxel4000
原产地:国产
用 途:
高能全息透射成像系统

nanoVoxel4000外观示意图
1 系统主要指标及配置单
No. |
产品描述 |
数量 |
1 |
整体指标 |
|
|
设备名称:高能全息透射成像系统 设备型号:nanoVoxel4000
无损/透视/高分辨/三维成像及分析研究 最高像素分辨率:2μm 最高空间分辨率: 3μm(空间分辨率卡实拍) 样品扫描最高尺寸:600mm 样品可放置空间:≥φ600㎜×h800㎜ 亚像素超分辨成像功能 探测器高频抖动防伪影功能 多种扫描成像模式:如DR投影,圆轨迹锥束CT,超视野锥束CT,螺旋锥束CT,有限角锥束CT,偏置锥束CT,自动拼接锥束CT, 原位力学加载拓展功能
|
1 |
2 |
高能微焦点X射线源系统 |
|
|
开放式折射靶微焦点X射线源系统:(开放式结构易于更换灯丝,主体可终身使用)
最高电压: 300kV 最大功率: 350W 靶类型:高功率靶 靶 材:钨 即插即用长寿命灯丝:配送6根 |
1 |
3 |
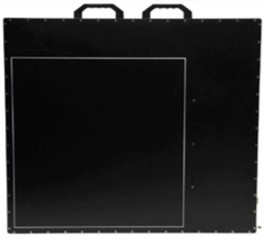
探测器部分 |
|
|
非晶硅大视野平板探测器系统:
像素矩阵3072pixel×3072pixel 成像面积≥425mm×425mm A/D动态范围16bit 高频抖动功能,可有效去除CT投影数据采集中探测器像素单元响应不一致等产生的伪影 |
1 |
4 |
高精度机械运动控制系统 |
|
|
基于大理石材质运动平台基座的全电脑控制高精度机械系统,各电动平移台工作距离连续可调,并设置防碰撞限位开关; 高精度机械旋转扫描平台: 旋转范围:≥360º 1、射线源Z轴600mm; 2、探测器Z轴行程600mm; 3、转台X轴行程1000mm; 4、转台Y轴行程250mm; 5、转台承重100kg 6、最大SDD 1300mm(探测器沿X方向固定,决定几何放大比) |
1 |
5 |
射线防护部分 |
|
|
射线屏蔽采用超大箱体,方便二次开发拓展,内置安全锁,X射线开启显示,可视透明防辐射窗口,方便在设备运行过程中从窗口观察样品情况。 辐射剂量当量<1μSv/h(在距离箱体外20mm的任何位置),优于国家GBZ117-2015《工业X射线探伤室卫生防护标准》要求及环评要求。 |
1 |
6 |
具有原位多场耦合加载系统 |
|
7 |
前端扫描机+后端GPU高速处理工作站 |
|
|
前端机 英特尔酷睿四核CUP处理器; 金士顿 8G内存; 三星(SAMSUNG)512GB SSD固态硬盘; 希捷(Seagate) 4TB机械硬盘; 戴尔(DELL) U2412M 24英寸16:10 IPS屏显示器; Win 7 专业版(64位); |
1 |
|
后端机(带GPU加速的高速工作站) 英特尔酷睿八核CUP处理器; 金士顿(Kingston) 256G内存; NVIDIA高性能显卡; 三星(SAMSUNG)1TB SSD固态硬盘; 希捷(Seagate) 16TB企业级机械硬盘; 戴尔(DELL) U2412M 24英寸16:10 IPS显示器; Win10 专业版(64位); 罗技(Logitech)无线键鼠套装; |
1 |
8 |
操作台 |
|
|
人体工学用户操控台 |
1 |
9 |
数据系统软件包 |
|
|
系统控制及数据采集软件VOXEL STUDIO SCAN |
1 |
|
三维断层扫描图像重构软件VOXEL STUDIO RECON |
1 |
|
三维视图软件 |
1 |
|
孔隙吼道分析软件 |
|
10 |
操作手册 |
|
|
操作手册(印刷版和电子版) |
1 |
2、软件清单及功能参数介绍
No. |
产品描述 |
数量 |
|
1 |
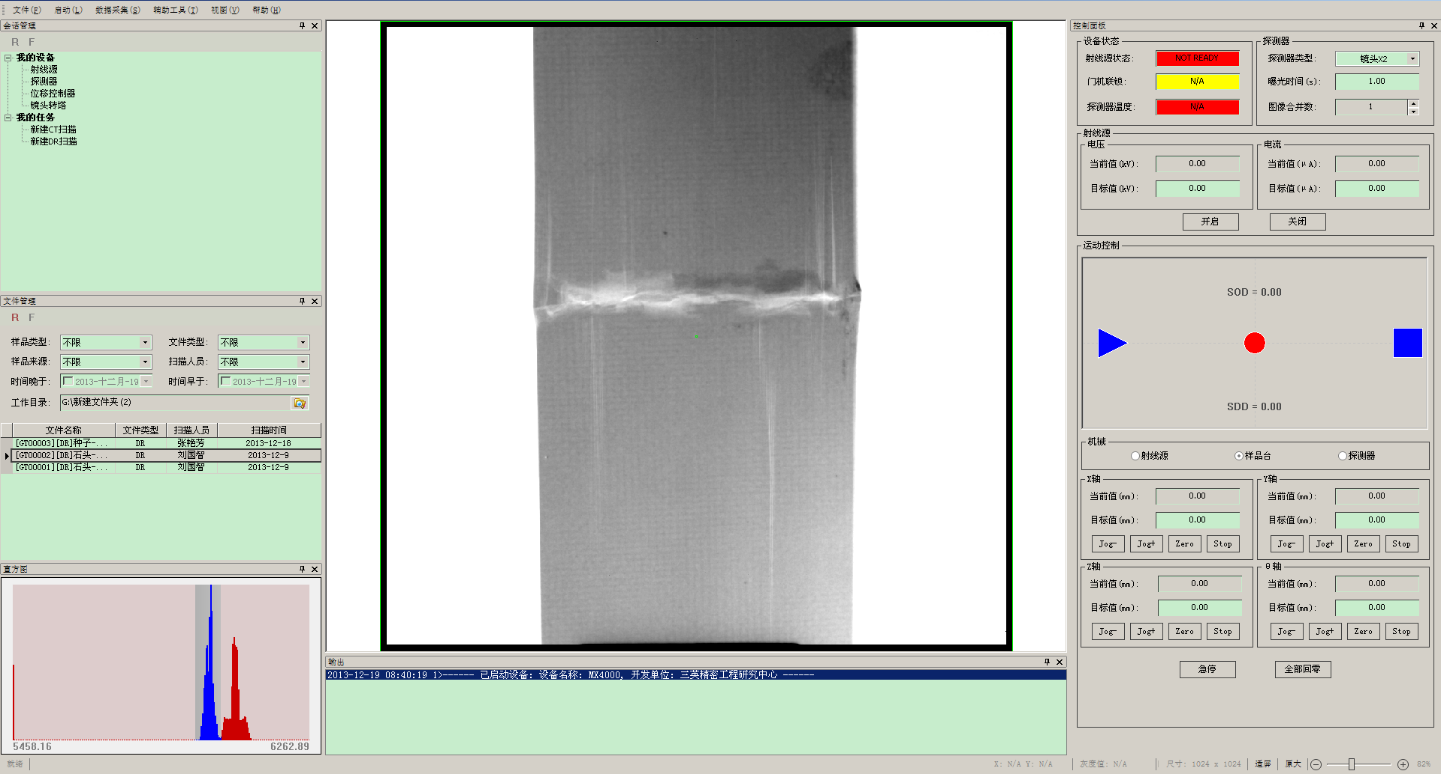
系统控制及数据采集软件 |
||
|
软件名称:系统控制及数据采集软件
软件界面 § 实时动态成像、二维DR投影拍照、旋转锥束扫描(CT断层扫描)、螺旋锥束扫描(CT断层扫描)、超视野锥束扫描(CT断层扫描)、有限角锥束扫描(CT断层扫描)、偏置锥束扫描(CT断层扫描) § 能够完成自动训机,探测器偏置、增益、非线性、像元不一致性校准。 § 可根据所要扫描的样品的类型,设置射线源、探测器的运行参数,控制各电机运动到能够获取最佳图像的位置,自动获取几何扫描参数及实时分辨率,并对样品进行多种模式的扫描,数据可用于图像的重建。 § 实现大视野平板CT及高分辨物镜耦合探测器的切换及扫描成像。 § 支持螺旋轨迹、有限角、局部聚焦、偏置等多种模式扫描,实现细长物体、大物体、板状物、感兴趣区域等成像功能。 § 自动识别和校正坏像元等,可提供优于探测器原厂的校正功能。 探测器单元对不同能量射线响应不一致的校正。 射线源锥束流强分布不均匀的校正。 系统几何参数误差带来的几何伪影的校正。 探测器随机抖动对环状伪影的校正。 § 可根据用户需求定制扫描工艺与流程。 |
1 |
|
2 |
数据三维重构软件 |
||
|
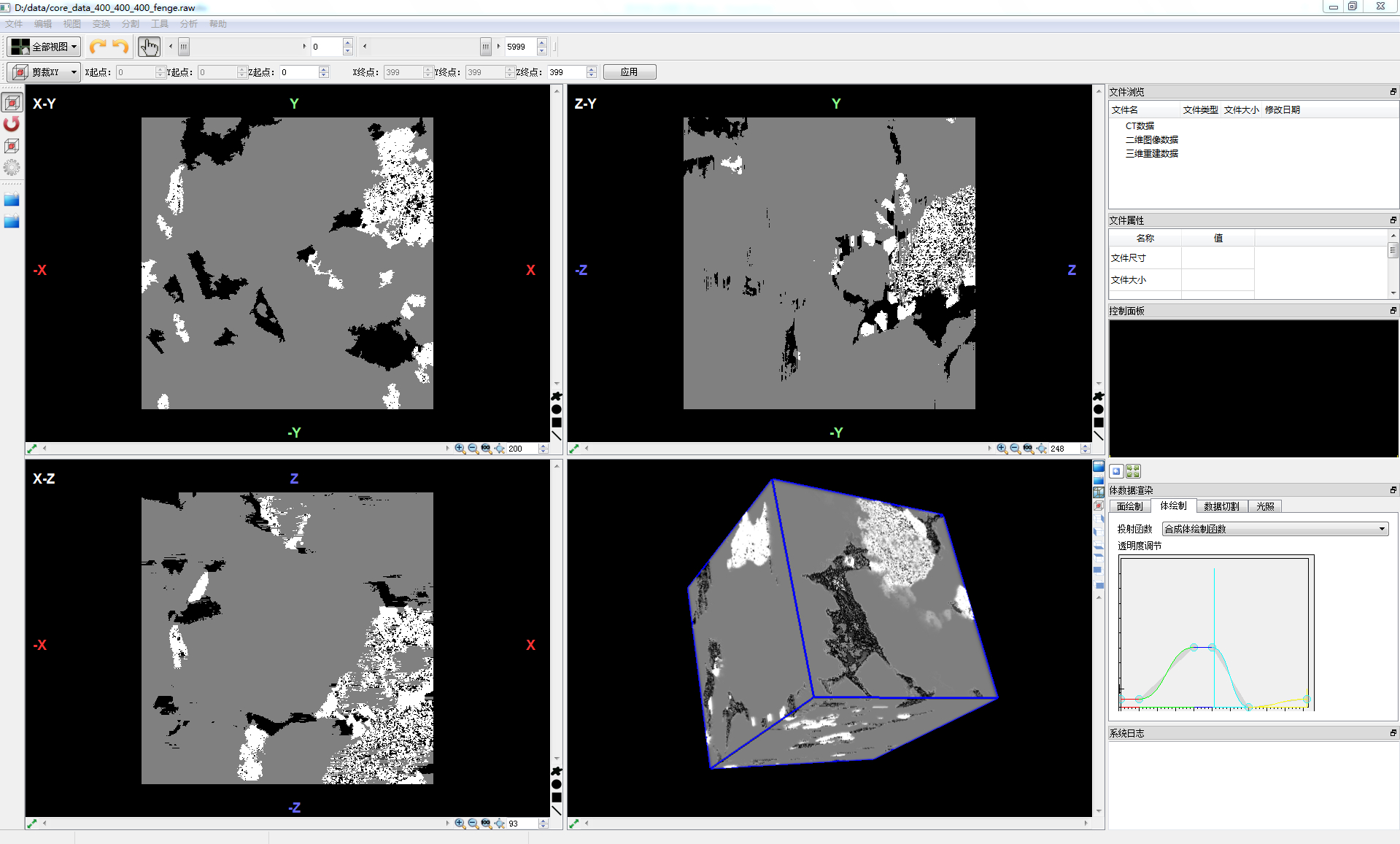
软件名称:数据三维重构软件
软件界面 § 该模块可对扫描软件获得的数据进行图像三维重构,获得三维体数据。 § 开放的软件平台,适用于用户的二次软件开发 § 系统自校准功能 § 具有6中可调重建参数,保证三维重建精准度(-探测器Y轴方向的偏移矫正量,探测器Z轴方向的偏移矫正量,探测器绕法向量的旋转角度矫正量,探测器绕其中心行旋转角度矫正量,探测器绕其中心列旋转角度矫正量,射线源到探测器中心的实际距离) § 几何扫描参数自动获取 § 多种解析重建算法及数据滤波器 § 特色的自适应迭代重建算法,实现低剂量扫描数据的高质量图像重建 § 多种高质量重建算法(解析、迭代、反投影等) § 几何参数调节与姿态设置 § 投影数据预处理(修复、环状伪影校正) § 图像后处理(去噪、增强和分割) § 拥有投影数据预处理及图像后处理功能。 § 处理得到的数据可以用于可视化软件的2D、3D展示及对应数据的分析。 |
1 |
|
3 |
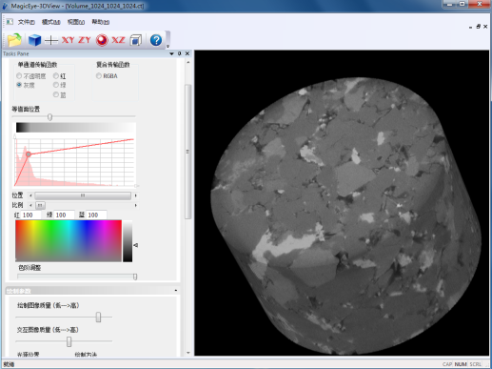
三维可视化分析软件 |
||
|
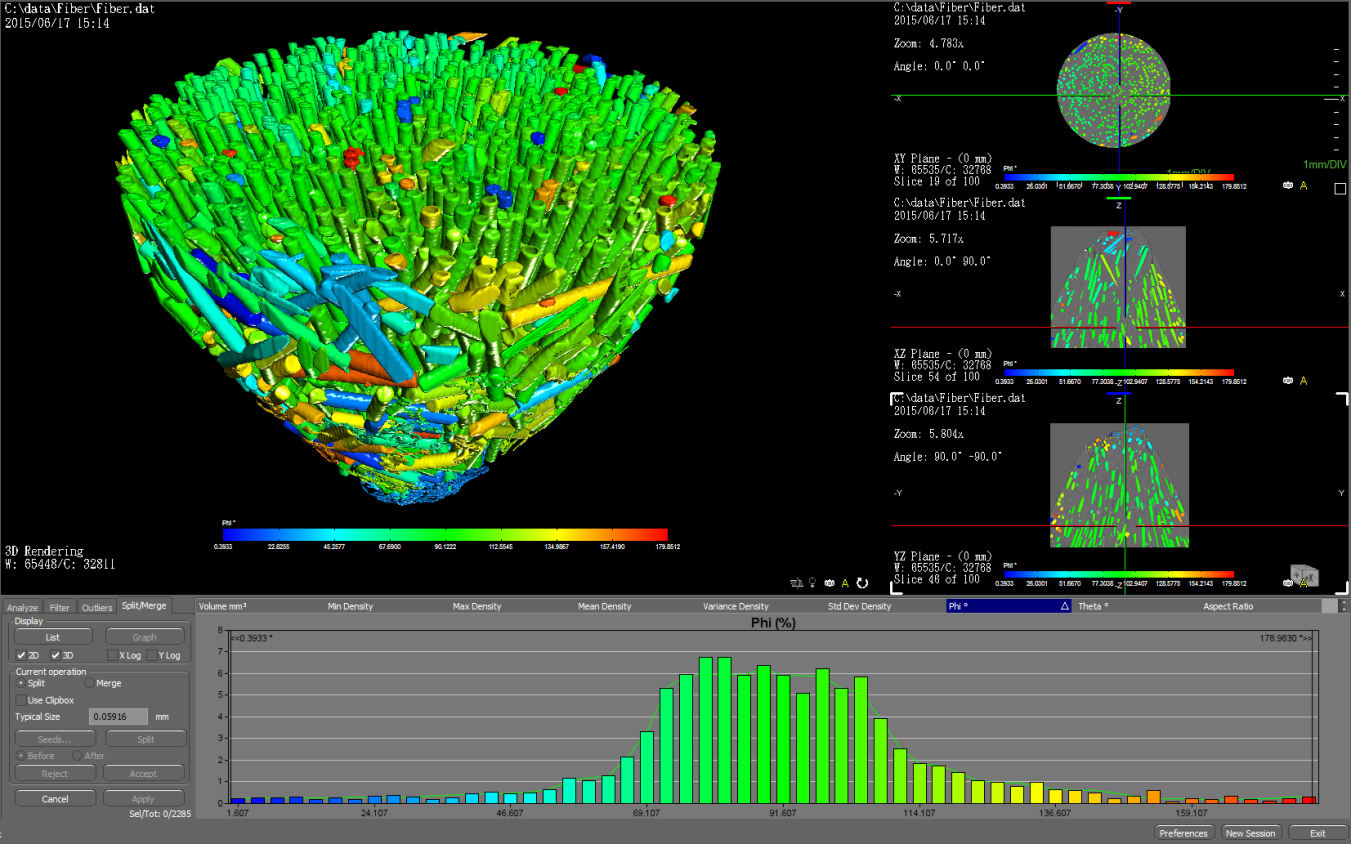
软件名称:三维可视化分析软件
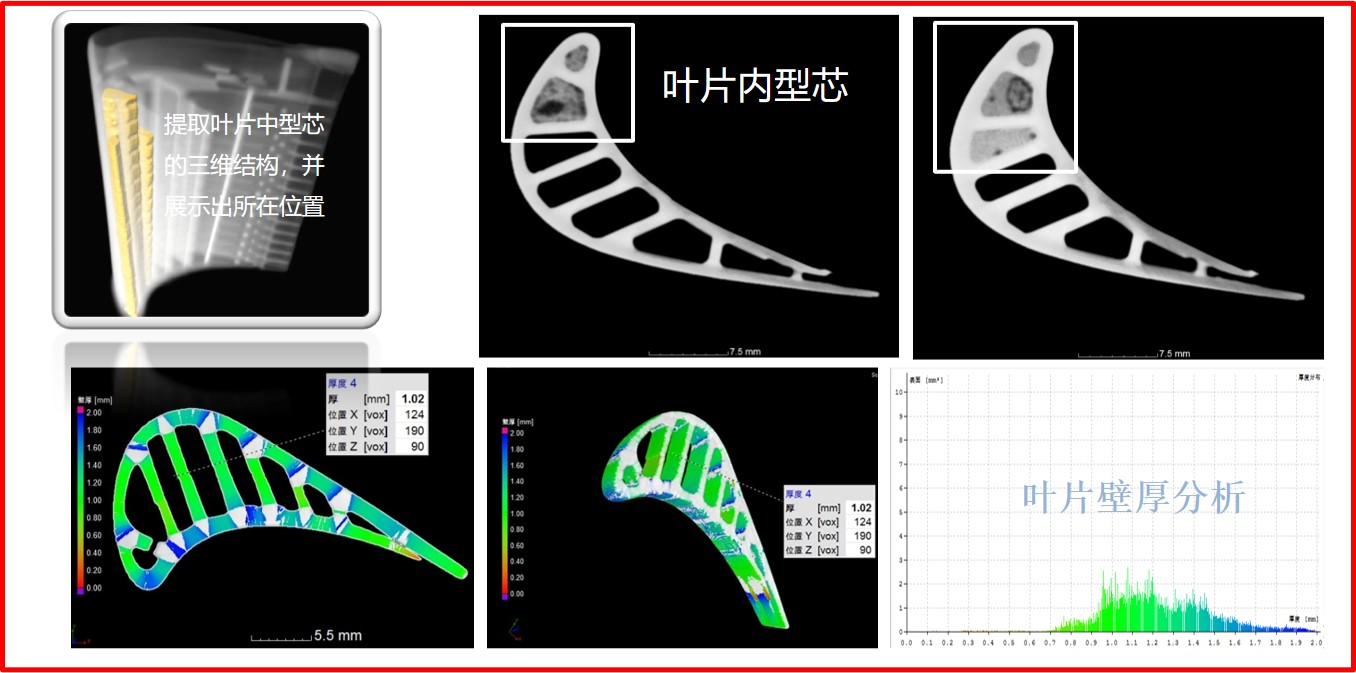
软件界面 § 读片:MPR / CPR / MIP § 定量分析(Quantification) § 图像融合(Fusion) § 图像分割(Segmentation) § 2D与3D效果导出为视频文件 § 三角网格(mesh)的生成与STL导出 § 分屏显示(最多四屏) § 二维与三维的图像滤波、去噪、平滑,边缘检测 § 切片图像二维配准, § 多模态多分辨率图像三维配准, § 目标物体分离与合并, § 壁厚分析,孔隙度分析, § 多种手动与自动图像分割工具用以测量三维物体的密度与空间信息等参数的统计分布 |
1 |
|
4 |
孔喉分析软件 |
||
|
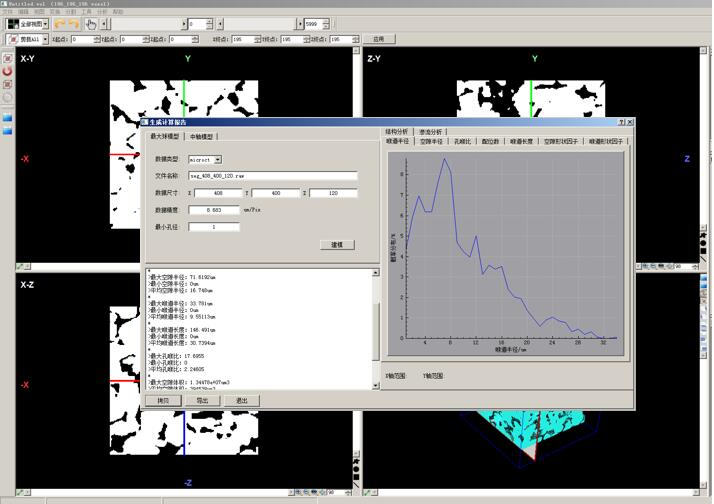
软件名称:孔隙喉道分析软件
软件界面 孔隙网络模型有助于从微观角度研究流体的各项性质。从孔隙网络模型中可以获取孔隙、喉道的几何特征和拓扑结构。 § 输入为分割数据、模型文件数据,输出为模型文件数据、渲染数据; § 孔隙网络模型统计功能; § 导出报表(孔隙率、孔隙数、喉道数、空隙半径分布、喉道半径分布、孔喉比、空隙形状因子、喉道形状因子); § 逐层孔隙率分析; § 模型颜色编辑功能; § 窗宽窗位对比度增强; § 直方图均衡; § 方框滤波、高斯滤波、中值滤波、双边滤波; § 拉普拉斯锐化; § 膨胀、腐蚀、开运算、闭运算; § 去除孤岛; § 二值化; § 反色; § OSTU单阈值、双阈值分割; § 孔隙度阈值关系分析; § 体绘制渲染; § 透明度、RGB传输函数调节; § MC面绘制渲染; § 单值等值面绘制; § 单值等值面选择; § 多值等值面绘制; 数据旋转、平移、放大缩小、视角切换 |
1 |
|
服务理念:国内高新技术研发制造商,能更好的提供技术售后服务、升级改造,时刻保证设备正常运行,任何时间,可通过网站、电话、邮件等与我们联络,24小时内,会有专职的技术人员提供及时完善的解决方案
软件免费升级(不涉及硬件更新):支持
响应时间:24h
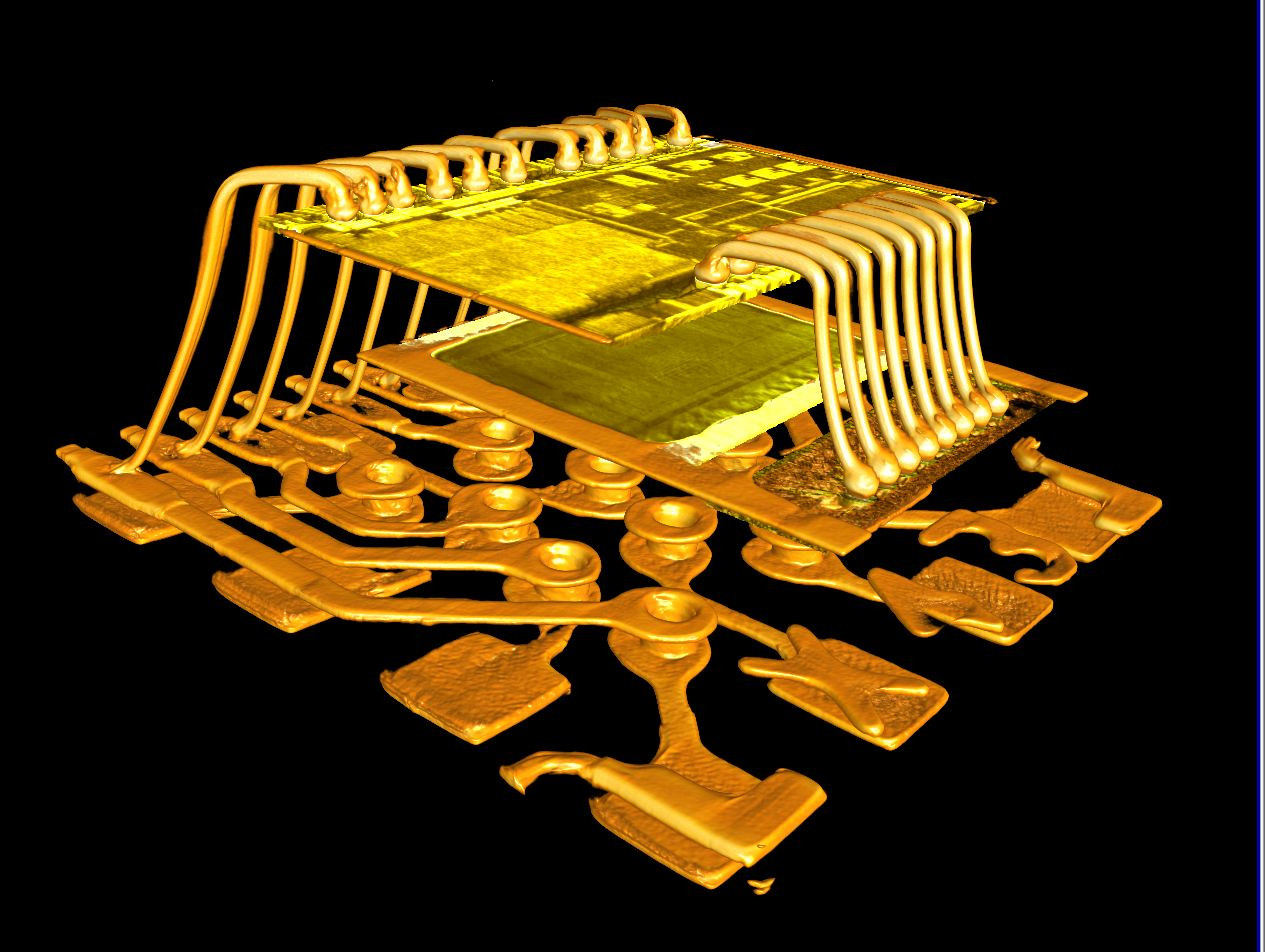
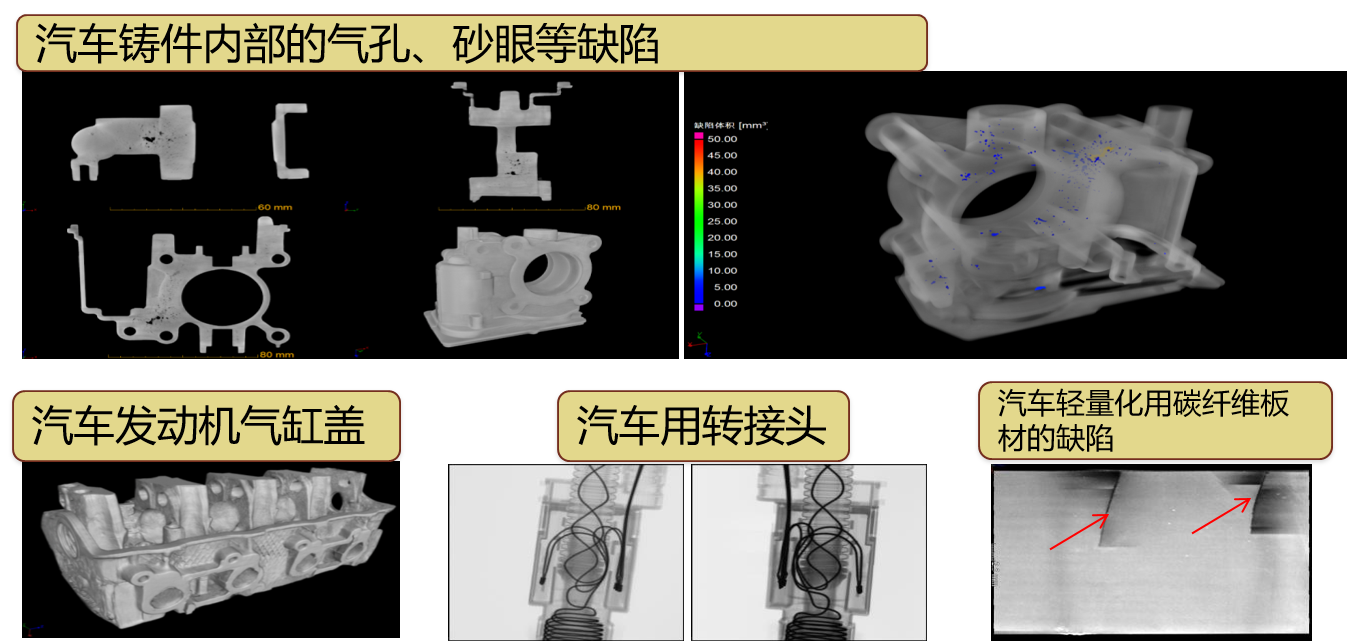
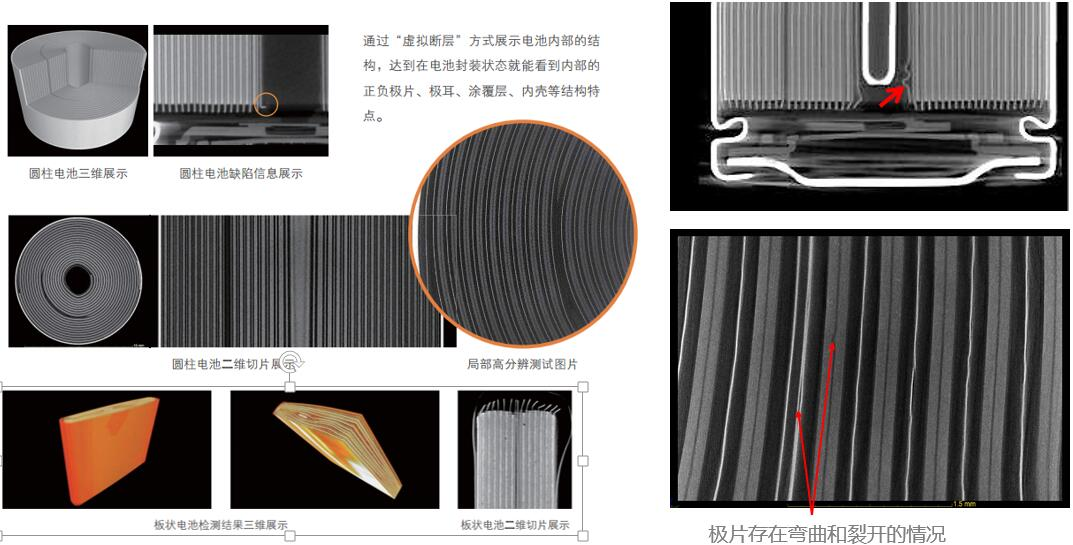
二、应用成像案例
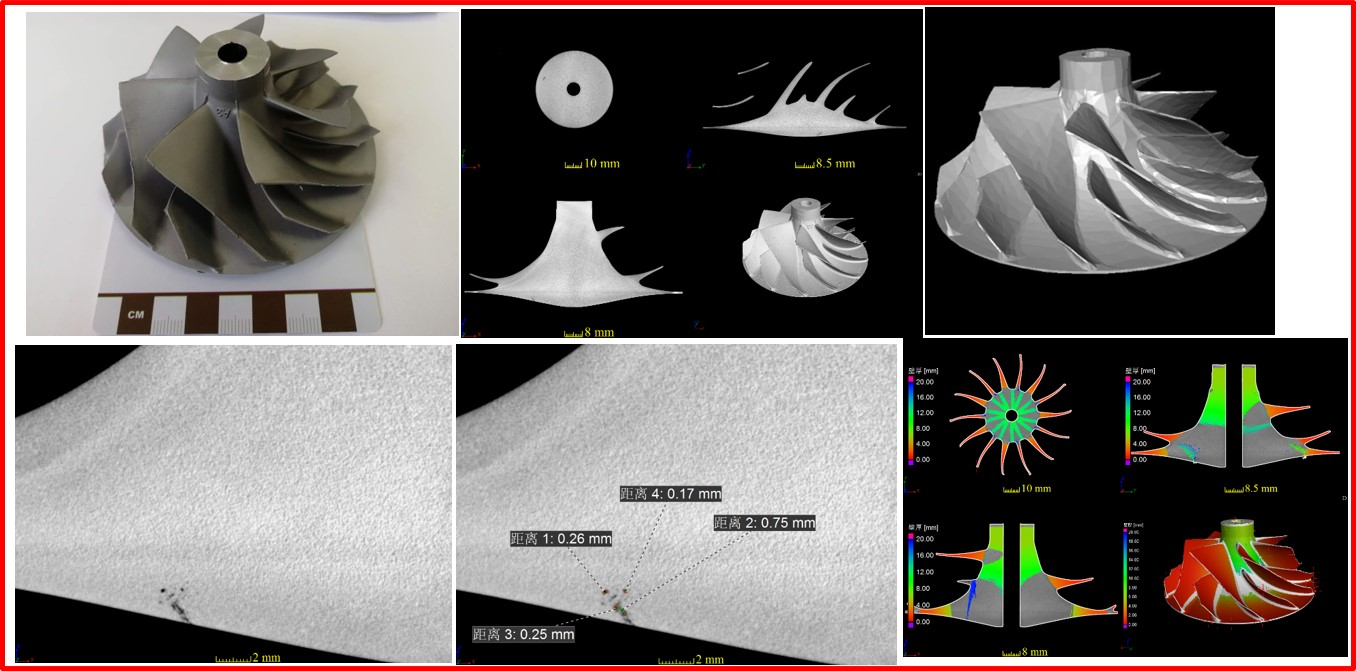
(1)先进制造领域
汽车领域研究
锂电池研究
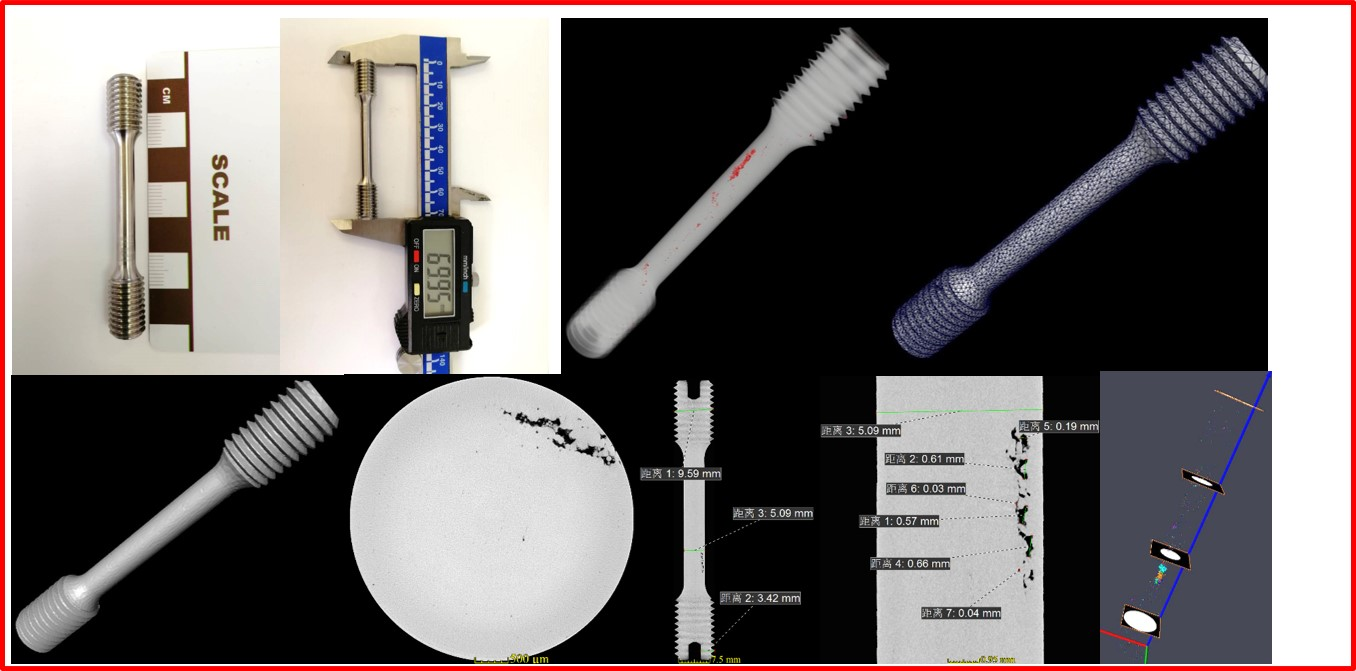
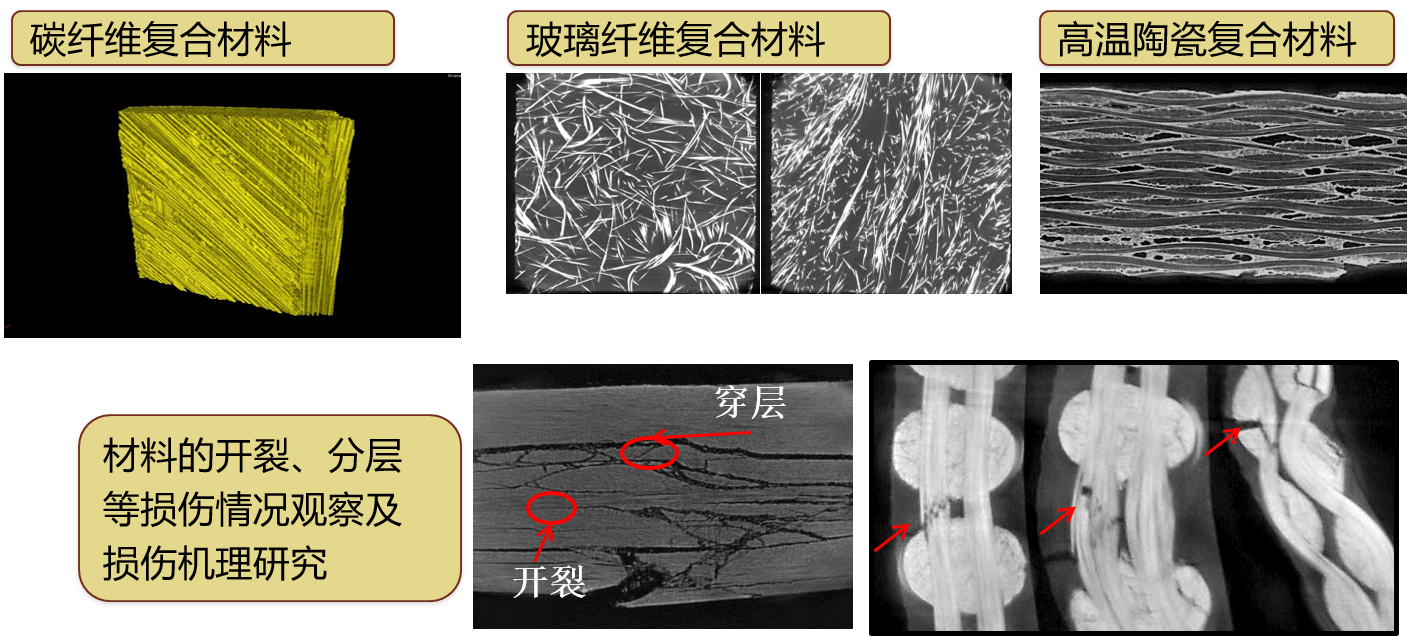
(2)材料科学领域
材料科学研究
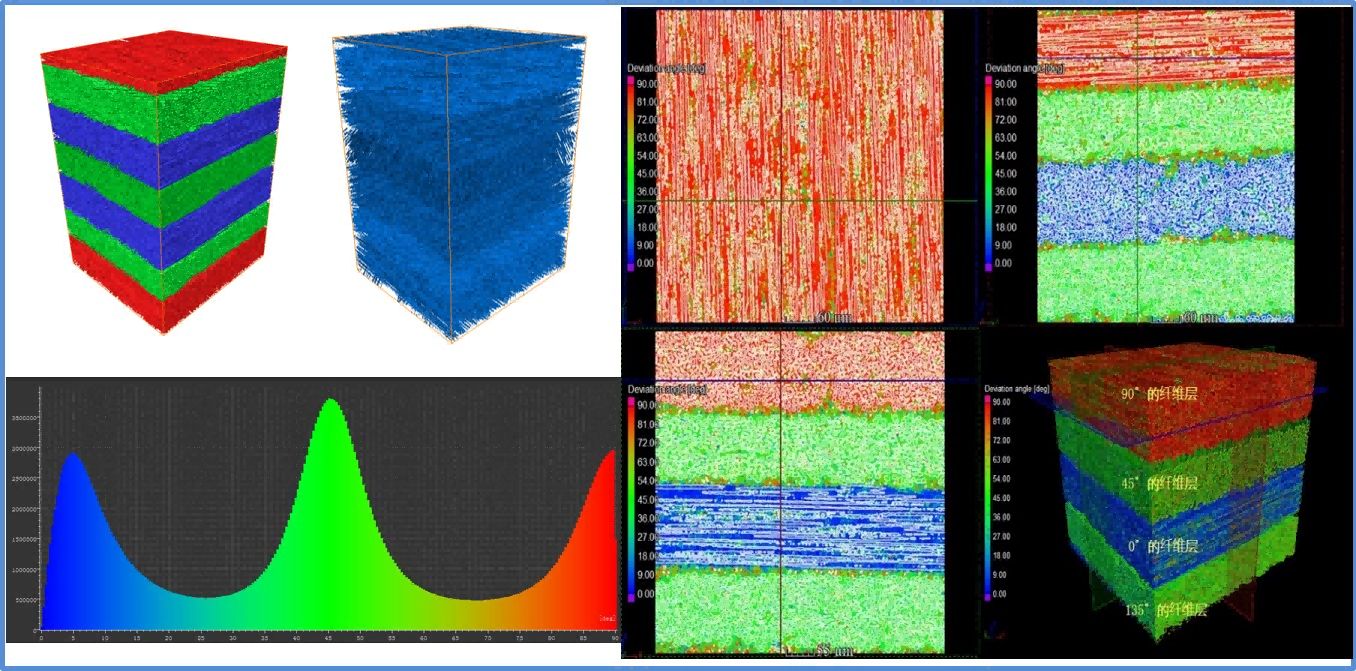
纤维取向分析 |